 2D Sonar Bild & Grundlagen
2D Sonar Bild & Grundlagen
Ein 2D Sonar bzw. der 2D Geber schallt kegelförmig ins Wasser und zeigt und die Echos auf dem Bildschirm. Auf der Animation rechts erkennt man den Kegel und das generierte Echolotbild. Allerdings zeigt die Animation zur einfachen Visualisierung nur den halben Kegel auf Steuerbord. Auch könnte man annehmen, dass das erzeugte Echolotbild genau dem entspricht, was mittig unter dem Geber erfasst wird. Das ist in der Realität anders. Durch die Kegelform des 2D Sonars gibt es eine Ausbreitung nach unten in alle Richtungen. Wir können also nicht zwischen rechts und links bzw. vorne und hinten am Boden unterscheiden.
Dieser 2D Sonar Bodenflächen Rechner soll Euch eine kleine Hilfestellung sein um zu sehen welche Flächen bei welchen Tiefen abgetastet werden und Echos auf dem Bildschirm darstellen können. Dabei ist es wichtig den Öffnungswinkel des eigenen Gebers zu kennen. Die Wassertiefe in Metern könne Ihr Euren gängigen Gwässsertiefen anpassen.
Bei einem 2D Echolotgeber mit einer Frequenz ist nur ein Öffnungswinkel angegeben. Bei einem 2D Echolotgeber mit zwei Frequenzen oder mehr gibt es mehrere Öffnungswinkel. Die Ausbreitung erfolgt aber immer kegelförmig. Dabei gilt, dass sich die größeren Öffnungswinkel auf die niedrigeren Frequenzen und die kleineren Öffnungswinkel auf die niedrigeren Frequenzen beziehen.
Wir haben unten eine Tabelle mit einigen Beispielen von Gebern eingefügt. Quelle: Animation rechts Lowrance.com
2D Sonar Kegel Flächenberechnung
| Für Airmar Geber findet Ihr einen ähnlichen Rechner auf der Airmar Seite. Airmar Bottom Calculator. | 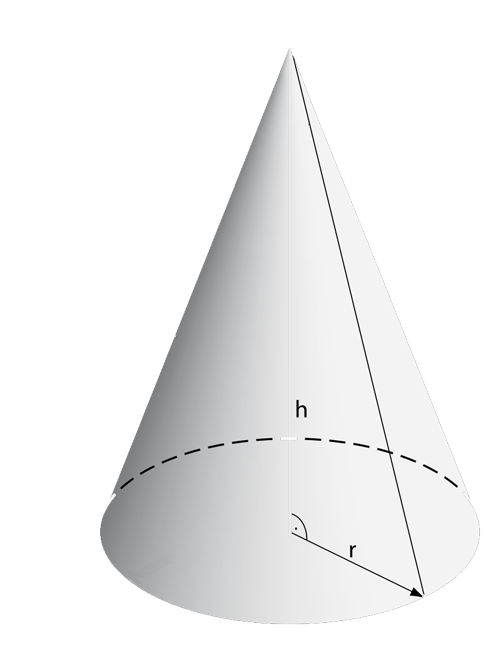 |
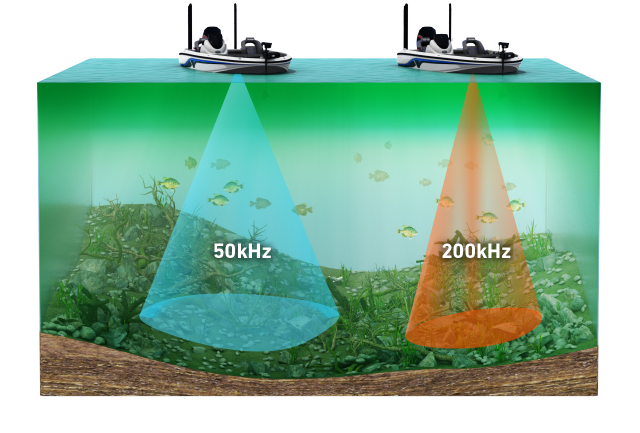
Tabelle mit Gebern und Öffnungswinkeln
Wie oben beschrieben haben Einfrequenz Geber nur einen Öffnungswinkel, Zweifrequenzschwinger zwei, während die Chirp Geber eines bestimmten Frequenzbandes den Öffnungswinkel entsprechend zur Frequenz ändern.
Dennoch gilt: Niedrige Frequenz großer Öffnungswinkel, hohe Frequenz kleinerer Öffnungswinkel.
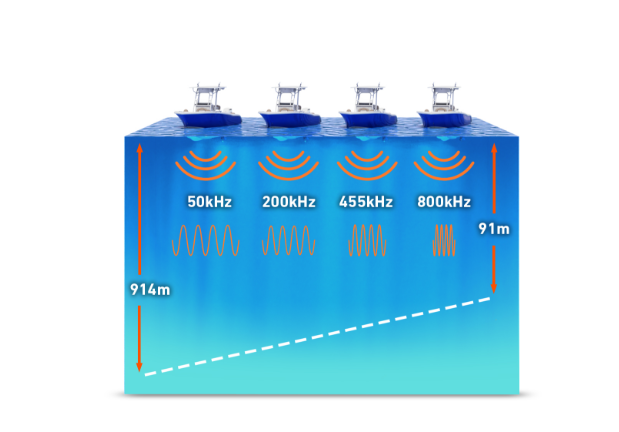
Ihr müsst ebenfalls immer beachten: Niedrige Frequenzen reichen tiefer bzw. weiter als höhere Frequenzen. Das gilt für alle Echolottechniken vom 2D bis zum Live-Sonar.
Wir haben hier auch wirklich nur ein paar Klassiker aufgeführt. Heute kommen die meisten Echolote mit Kombi-Gebern, die sowohl klassisches 2D Sonar als ggf. auch DownScan und SideScan unterstützen. Aber auch bei diesen findet man machmal die Leistungswerte der 2D Module.
| Hersteller | Gebermodell | Frequenz Low | Öffnungswinkel Low | Frequenz High | Öffnungswinkel High |
| Airmar | TM150-M | 95 kHz | 26° | 155 kHz | 17° |
| Airmar | TM185-MW | 60 kHz | 57° *** | 100 kHz | 73° *** |
| Garmin | Zwei-Frequenz Medium | 77 kHz | 45° | 200 kHz | 15° |
| Garmin | Zwei-Frequenz Low | 50 kHz | 40° | 200 kHz | 10° |
| Garmin | Mid-Chirp (GT15M-TM) | 85 kHz | 24° | 165 kHz | 13° |
| Garmin | HW-Chirp (GT8HW-TM) | 150 kHz | 24° | 240 kHz | 16° |
| Humminbird | XNT-9-20-T | 83 kHz | 60° | 200 kHz | 20° |
| Lowrance | Bullet-Skimmer | 200 kHz | 44° | ||
| Lowrance | HST-WSBL | 83 kHz | 52° | 200 kHz | 22° |
| Lowrance | HST-DFSBL | 50 kHz | 29° | 200 kHz | 12° |
*** Der Airmar TM185-MW ist ein interessanter neuer Airmar Geber, mit einer elliptischen Kegelform. Der Kegel hat nach vorne / hinten im Durchschnitt nur 16° Öffnungswinkel.
 Warum denn 2D Sonar, es gibt doch DI, SI und Live
Warum denn 2D Sonar, es gibt doch DI, SI und Live
Wenn man sich das Ergebnis vom 2D Sonar ansieht und dabei den Raum für Interpretationen fragt man sich schnell ob das 2D Sonar noch eine Existenzberechtigung hat?
Hat es und zwar aus zwei Gründen:
Preis: Meistens sind 2D Echolote und 2D Echolot-Geber (Performer ausgenommen) preisgünstiger als die Kombinations Echolote mit DI, SI oder LiveTechnik.
Reichweite: Alle anderen Echolot-Techniken müssen für Ihr sauberes Bild mit höheren Frequenzen arbeiten. Eine hohe Frequenz hat weniger Energie und somit eine geringere Reichweite, liefert allerdings auch feinere Echos. Allerdings leben unsere Echolot natürlich von der Aussendung von Frequenzen aber vielmehr eben von deren Echos, die wir wieder empfangen und angezeigt bekommen. Wenn wir in Norwegen in Tiefen über 80m + und zudem im Salzwasser (ein weiterer leistungsdämpfender Faktor) unterwegs sind dann nützen uns Frequenzen von mehr als 200 kHz in der Regel nichts. Höhere Frequenzen (nehmen wir die Klassiker 455 oder 800 kHz) würden den Boden erst gar nicht erreichen. Vielleicht erreichen sie den Boden, dann können sie sich auf dem Rückweg verlieren. Das ist grundsätzlich der Wellenform der hohen oder tiefen Frequenzen geschuldet. Wenn Ihr in Norwegen oder sonstwo in tiefen, vielleicht sogar salzhaltigen, Gewässern auf Mietbooten unterwegs seid finden sich häufig noch "uralte" Echolot-Klassiker mit 2D Sonar die ihren Zweck dort immer noch voll erfüllen.
 2D Sonar und Chirp
2D Sonar und Chirp
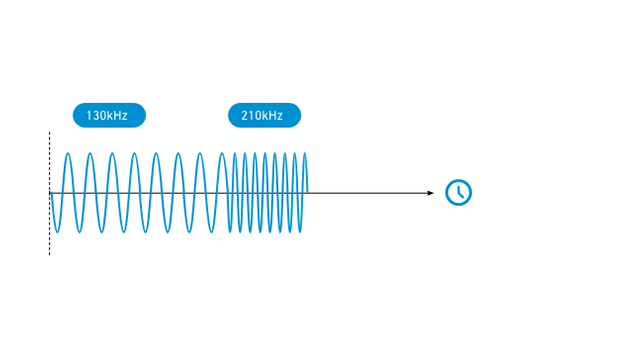
Parallel zu den neuen hochauflösenden (Hoch Frequenz) Technologien, die im Süßwasser und Nahbereich erstklassige Echolotbilder liefern ist auch der Begriff Chirp Echolot aufgekommen. CHIRP ist die Abkürzung für „Compressed High Intensity Radar Pulse“. Echolote und Radargeräte funktionieren vom physikalischen Grundsatz her identisch.
"Anstatt Signale jeweils nur auf einer Frequenz zu senden, wie es beim traditionellen Echolot der Fall ist, umfasst ein Signal bei CHIRP Geräten mehrere Frequenzen. So wird fortwährend ein Frequenzbereich von niedrig bis hoch durchsucht." Quelle Garmin
Diese Technologie kann also grundsätzlich im tiefen Frequenzspektrum als auch im ganz hohen Frequenzspektrum erfolgen. Insofern findet man heute auch zunehmend 2D Chirp Echolote und Geber. Der Airmar TM150M Echolotgeber ist hier ein altbekannter Chirp Klassiker.
Wichtig ist natürlich, dass die Kombination aus Echolot und Geber immer zueinander passt, sprich das Echolot selber muss ebenfalls Chirp unterstützen.
Das Echolot Chirp Bild wird realtiv klarer, hat eine höhere Auflösung und eine bessere Trennung der Ziele in jedem Frequenzspektrum.
 DI ist auch ein 2D Sonar
DI ist auch ein 2D Sonar
Beim DI Sonar verhält es sich ähnlich wie beim klassischen Sonar, der Kegel ist aber stark elliptisch und die Frequenzen sind in der Regel über 450 kHz. Das Bild ähnelt aber dem klassischen 2D Sonar in der Schnittperspektive.
Herstellerbezeichnungen:
Garmin = DownVü
Humminbird = Down Imaging
Lowrance = Down Scan Imaging
Raymarine = Down Vision
Wie oben beschrieben macht das DI nur Sinn in flacheren Gewässern (in der Regel bis 50m Tiefe) und ist stark abhängig vom Salz- und Schwebstoffgehalt. Hier allerdings spielen die hohen Frequenzen ihren Vorteil aus. Zwar ist man in der Reichweite beschränkt aber die feineren Wellen der höheren Frequenzen liefern nunmehr viel feinere Echos und damit tolle 2D Bilder vom Boden und der Struktur.
Allerdings sollte man das DI höchstens als Ergänzung zum klassischen 2D Echolot nutzen. Während man Fische auf einem 2D Sonar im klassischen Frequenzbereich <200 kHz gut als Sicheln erkennen kann, nimmt das Echo der Schwimmblase bei den hohen Frequenzen ab. Die Echos sind hier teilweise deutlich schlechter sichtbar. Die Prallelbilder 2D klassische 200kHz und 2D DI 455/800 kHz variieren allerdings bei den unterschidlichen Herstellern.
"Wie Side Imaging verwendet auch Humminbird Down Imaging einen hauchdünnen Hochfrequenzstrahl, um bildähnliche Bilder von Strukturen, Vegetation und Fischen zu erzeugen. Aber im Gegensatz zu Side Imaging sind Down-Imaging-Echos genauso ausgerichtet wie herkömmliche, nach unten gerichtete Sonar-Echos – wobei die neuesten Informationen auf der rechten Seite des Bildschirms angezeigt werden." Quelle Humminbird.
Ebenfalls, darum haben wir geschrieben DI ist ein 2D Sonar, kann man auf dem DI Bild nicht erkennen, ob sich das Abbild auf der Anzeige recht oder links vom Boot befindet.